032号
【製作記】ロビ2 第32号
Posted On
1月 26, 2018
at 12:00 am
by 機械好きな博士 / No Comments
|
 ロビ2 ロビ2
 32号/全80号 < あと48号で完成! > 32号/全80号 < あと48号で完成! >
 2018年1月26日(火曜日) 2018年1月26日(火曜日)
 株式会社デアゴスティーニ・ジャパン 株式会社デアゴスティーニ・ジャパン
|
1.
|
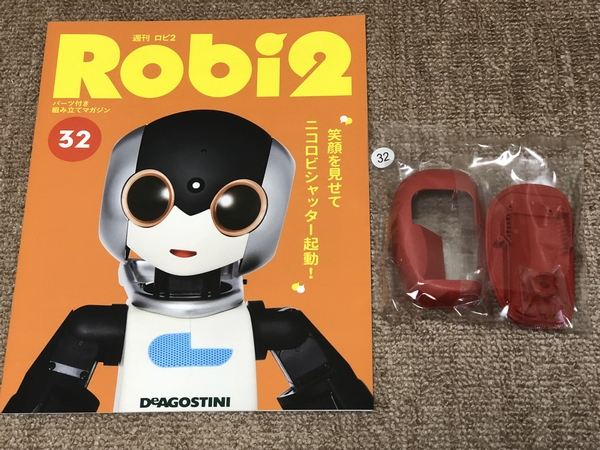
左足カバー |
1個
|
|
2.
|
左足パネル |
1個
|
|
3.
|
足首ジョイント |
1個
|
|
4.
|
M2×6mm皿ネジ |
3個+予備1
|
|
5.
|
M2×6mmなべネジ |
4個+予備1
|
|

|
●第30号で製作中のサーボモーター(ID11)
●右足パネル
●M2×6mmなべネジ
を用意します。
右足パネルに第30号で製作中のサーボモーター(ID11)をM2×6mmなべネジで取り付け、右足パネル上にサーボモーター(ID11)のサーボケーブルを引き回します。 |
|

|
●製作中の左足パネル
●足首ジョイント
●M2×6mmなべネジ
を用意します。 |
|

|
製作中の左足パネルに足首ジョイントをM2×6mmなべネジで取り付けます。 |
|

|
サーボモーター(ID11)のサーボケーブルを左足首フレームの円い穴に通します。次にサーボケーブルは、左足首フレームの四角い穴に通します。 |
|

|
●第31号で製作中のサーボモーター(ID10)
●製作中の左足パネル
を用意します。 |
|

|
製作中の左足パネルのサーボモーター(ID11)のサーボケーブルを第31号で製作中のサーボモーター(ID10)に取り付けます。
サーボケーブルを取り付けたコネクタ部分に第4号で提供されました保護シールを貼ります。 |
|

|
第31号で製作中のサーボモーター(ID11)のサーボケーブルの折り返ししたものを左足首フレームの四角い穴に通します。 |
|

|
第31号の製作中のサーボモーター(ID11)を左足パネルに取り付けます。
|
|

|
第31号で製作中のサーボモーター(ID11)のサーボケーブルの折り返ししたものを左足首フレームに取り付けたステップネジに引っ掛けます。 |
|

|
●製作中の左足パネル
●左足カバー
●M2×6mm皿ネジ
を用意します。 |
|

|
製作中の左足パネルに左足カバーをM2×6mm皿ネジで取り付けます。 |
|

|
●製作中の左足首
●ヘッドスタンド
でを用意します。 |
|

|
製作中の左足首のサーボモーター(ID10)とサーボモーター(ID11)の動作テストを行います。 |

雑誌での製作方法と異なり、独自の方法で製作している部分があります。
初版 2018年1月26日
|
このHP内の画像等を許可なくHPの掲載、複製、再配布等することは禁止致します。